
Son yenilenme tarihi: 22.4.2026
Dersler/Sınavlar
Sinyaller ve Sistemler
Son yenilenme tarihi: 5.1.2026
- İlk hafta birinci kısım ders sunumu
- İlk hafta ikinci kısım ders sunumu
- "Sinyaller" ünitesinin, ilk hafta ikinci kısım sunumundan sonraki kısmı.
- Sistemler ve Blok Şemalar
- "Sistemlerde Çeşitli Özellikler" ve "Doğrusal Zamanla Değişen Sistemler"
- DZD Sistemler ve Konvolüsyon konusu (örnekli) ve örneklerin sunum (ppsx) dosyası
- DZD Sistemlerde Özellikler ve Kolayliklar örnekli konu dosyası.
- Diferansiyel denklemler konusunu çıktı almak için pdf dosyasını ve konu anlatımını izlemek için slayt gösterisini indirebilirsiniz. Buradan indirmekte sorun yaşarsanız şunlardan da indirebilirsiniz: pdf dosyası ve slayt gösterisi(bu linkten sunumu indirmeden çalıştırırsanız iyi görüntülenmeyebilir.)
- Fark denklemleri konusunu çıktı almak için pdf dosyasını ve konu anlatımını izlemek için slayt gösterisini indirebilirsiniz. Buradan indirmekte sorun yaşarsanız şunlardan da indirebilirsiniz: pdf dosyası ve slayt gösterisi(bu linkten sunumu indirmeden çalıştırırsanız iyi görüntülenmeyebilir.)
- Konvolüsyonu bir örnek üzerinde anlatan bir sunum. Ayrıca bazı konvolüsyon soruları ve çözümleri
- Fourier Analizi YENİ (Bu dosyanın önceki halini çıktı alanlar, 3. sayfadaki ck formülünde integral önündeki katsayıyı 1/T0 diye düzeltmeliler.)
- Ayrık zamanlı Fourier serisi çözümlü çalışma soruları
- MATLAB'da Fourier seri katsayılarını bulma ve seriyi çizdirme programı (Açılan iki dosya da MATLAB'ın etkin dizini içinde olmalıdır)
- Fourier serileri hakkında simetri özelliklerine dayanan basit bir test ve cevapları. Buradaki test aynı zamanda cevabı bilinen seri örnek soruları yerine de alıştırma yapmak için kullanılabilir. Lütfen cevaplara bakmadan önce çözmeye çalışınız.
- Erkek sesiyle bayan sesini ayırt eden ilkel bir MATLAB veya Octave programı indirmek için sağ tıklayıp farklı kaydediniz veya sol tıklayıp kopyalayıp ".m" uzantılı bir dosyaya kaydediniz. Gerekli açıklamalar program içinde verilmiştir. MATLAB kullanma imkânı olmayanlar, https://www.gnu.org/software/octave/download.html adresinden Octave indirip kullanabilirler (GUI tercih edebilirsiniz).
- Vize 2021 soruları ve cevap anahtarı
- Vize soruları ve cevap anahtarları(Kasım 2011'den itibaren)(Uzaktan sınav soruları özellikle paylaşılmamıştır.)
- 2022 final sınavı soruları ve cevap anahtarı
- Ocak 2020 bütünleme soruları ve cevap anahtarı
- Ocak 2020 final soruları ve cevap anahtarı
- Final ve bütünleme soruları ve cevap anahtarları (Ocak 2012'den itibaren)(Uzaktan sınav soruları özellikle paylaşılmamıştır.)
- Çok eski yılların sınav soru ve çözümleri(Ocak 2011'e kadar).
Mikrodalga Teorisi
Son yenilenme tarihi: 6.1.2024
Aşağıda boş satıra kadar dosyalar yukarıdan aşağıya sıralı olarak derste gördüğümüz konularımızdır. Finale ve bütünlemeye tüm konular dahildir.
- Final 2023 soruları ve cevap anahtarı
- Final 2022 soruları ve cevap anahtarı
- Vize 2021 soruları ve cevap anahtarı
- Vektör Bağıntıları
- Frekans Bölgeleri
- Mikrodalga kullanımı
- Düzlem dalgalar
- Yansıma ve kırılma
- Paralel iletim hatları
- Smith çalışmaları sunumu
- Dalga kılavuzları
- Örnek vize soruları
- Final/bütünleme örnek soruları
- 2019 vize soruları ve cevap anahtarı (Dikkat: 1. soruda tutarsız veri fazlası olmuş. Faz hızı için örnek vize sorularındaki gibi tutarlı olmalıydı.)
- 2020 final soruları ve cevap anahtarı
- son bütünleme soruları ve cevap anahtarı
Son yenilenme tarihi: 5.1.2026
Güç Elektroniği 1
- İlk hafta sunum dosyası
- İlk 4-5 haftalık konularımız
- Güç ve harmonik analizi örneği
- Doğrultucular
- 2024 vize soruları ve cevap anahtarı
- 2019 final soruları ve cevap anahtarı
(Uzaktan sınav soruları özellikle paylaşılmamıştır.) - 2011'den itibaren elde mevcut tüm FİNAL/BÜTÜNLEME sınav soruları ve cevap anahtarları
- 2025 vize sınav soruları ve cevap anahtarıYeni
- 2011'den itibaren elde mevcut tüm VİZE sınav soruları ve cevap anahtarları (Uzaktan sınav soruları özellikle paylaşılmamıştır.)
- Doğrultucuların MATLAB Simulink modellerini indirip çalıştırabilirsiniz.
- Doğrultuculara çalışmak için Simulink modelleri ve çizim kâğıtları takımını indirebilirsiniz.
- DC/DC Çeviriciler ve Eviriciler konusunda sayfa 13 ortasında vy<0 kısmında düzeltme yapılmıştır.
Buradaki soru çözümlerini slayt gösterisi olarak da izleyebilirsiniz.
Soru çözümlerindeki parametrelere göre düzenlenmiş DC/DC çeviricilerin Matlab Simulink modellerini de indirebilirsiniz.
- Son (eviriciler için) çizim kâğıtları ve MATLAB'da çizdirme programlarını indirebilirsiniz.(DC/DC çeviricilerde vref değerini 0*t+150 yerine mesela 0*t -150 yaparak da gözleyiniz. 0*t kısmını bozmayınız.)
Son yenilenme tarihi: 7.4.2026
Güç Elektroniği 2
- Bu ders, Güç Elektroniği 1 dersini alan ve daha ilerisini öğrenip uygulamak isteyenlere tavsiye edilir. Güç Elektroniği 1 dersini almayanlar da alabilir ama bu eksiği kendileri telafi etmelidirler. Bu derste Güç Elektroniği 1 konularına dair çok az hatırlatma yapılacaktır. Dersin değerlendirilmesi, %20 vize, %30 final/bütünleme ve %50 proje olacaktır. Proje konuları ve gruptaki en fazla öğrenci sayısı daha sonra burada belirtilecektir.8.2.2026
- İlk iki haftalık konuların anlatıldığı sunum dosyası (İndirip de okumanız/izlemeniz tavsiye edilir.)7.4.2025
- Örnek vize soruları7.4.2025
Son yenilenme tarihi: 14.11.2018
Sis.Mod.v.Ot.Kontrol
Makine Mühendisliği Bölümüne yıllar önce verdiğim derse ait dokümanlar bulunmaktadır.
- Son (2018) vize soruları ve cevap anahtarı
- Vize soru örnekleri ve çözüm veya cevapları
- Final/Bütünleme soru örnekleri ve çözüm veya cevapları
- Durum geribeslemesi için kendiniz keyfi matrisler ve istenen özdeğerler atayarak soru üretebilirsiniz. Bulduğunuz sonuçları şu MATLAB model dosyası üzerinde deneyebilirsiniz. Ancak bu modeli çalıştırmadan önce şu satırı kendi bulduğunuz değerlerinize göre düzenleyip çalıştırmalısınız:
n=2; A=[1 5;-2 3]; B=[0;2]; C=[1 1]; K=[11.1 12]; Kr=12.5;
Bu sistemde keyfi olarak y* = 2.3 alınmıştır. İsterseniz bu değeri değiştirebilirsiniz. Sistem çıkışının y* değerine yakınsadığını grafikten görmelisiniz. - Keyfi bir A kare matrisi için e^(A*t) matrisi sorusu da üretip çözebilirsiniz. Çözümünüzün doğruluğunu MATLAB'da görmek için bir defalık
t=sym('t')komutunu çalıştırdıktan sonra, A matrisiniz her değiştiğinde A'yı düzenleyip aşağıdakikomut satırını çalıştırabilirsiniz. Unutmayınız, expm komutu matris olarak eksponansiyel alır, exp komutu ise skaler olarak.A=[-2 4;1 -2];expm(A*t) - Tüm geçmiş vize sınav soruları ve cevap anahtarları
- Tüm geçmiş final/bütünleme sınav soruları ve olanların cevap anahtarları
Son yenilenme tarihi: 12.7.2025
Elektrik ve Elektroniğe Giriş
Makine Mühendisliği Bölümüne verilen derstir.
Dosyaları görüntülemekte sorun yaşıyorsanız muhtemelen cep veya tablet gibi cihazınızın izinleriyle ilgilidir. Fark etmemiş olabileceğiniz izin isteklerine dikkat ediniz.
- Ders tanıtım formu
- Temel Tanımlar
- Tam Devre Analizi (Son iki düğüm örneğinin powerpoint sunumu)
- Elektriksel Ölçümler
- Kısmi Devre Analizi
- Türevsel elemanlar
- Karmaşık Sayılar sunumu
Pdf olarak isterseniz burada - AC Devre Analizi
- Temel Elektronik Elemanlar
- Elektrik Jeneratör ve Motorları
- Vize için çalışma soruları ve çözümleri
- 2024 final soruları ve cevap anahtarı
- 2024 Vize soruları ve cevap anahtarı (Öğrenciden bu kadar ayrıntılı yazması beklenmiyordu. Anlaşılsın diye uzun uzun açıkladım.)
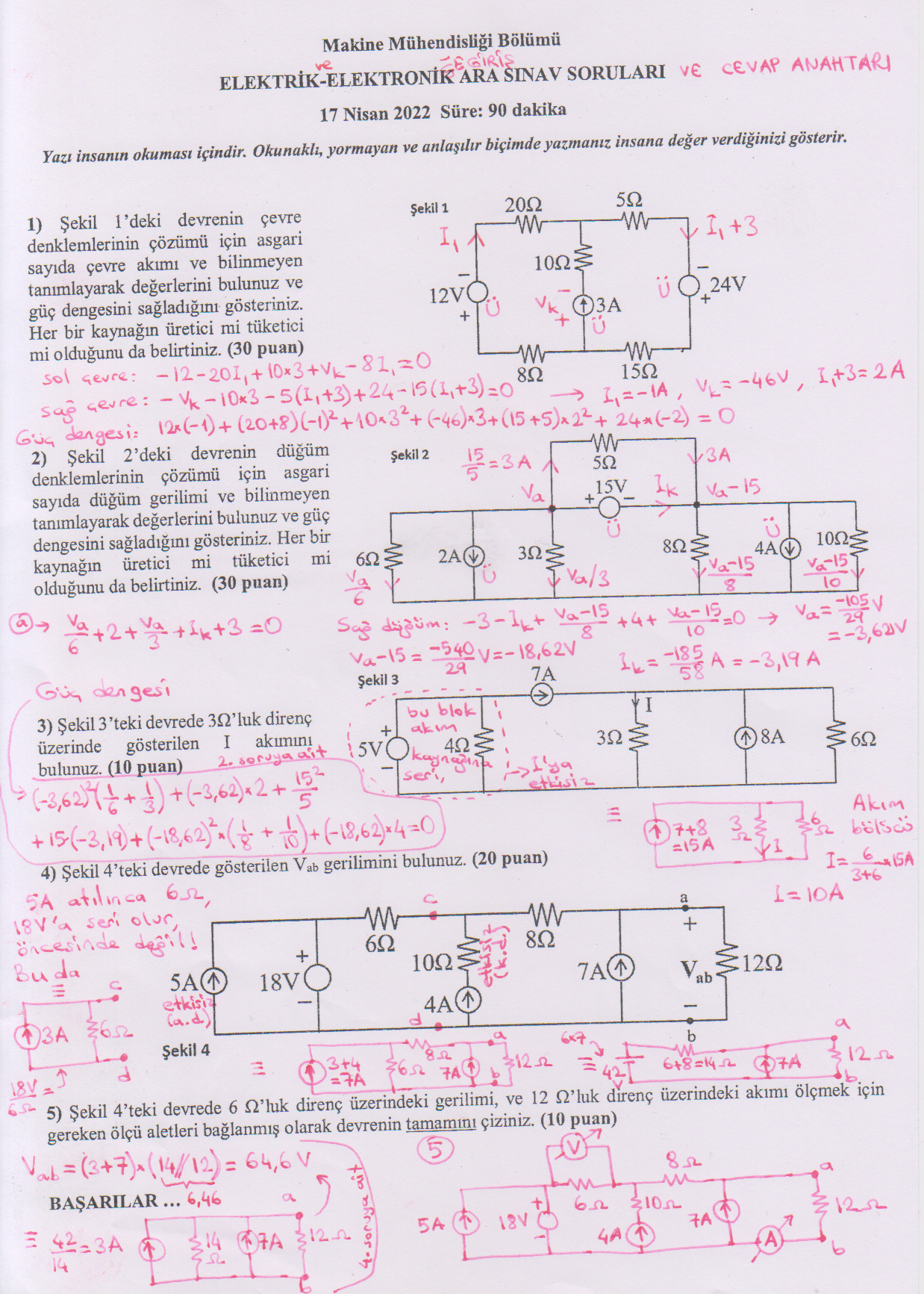
- 2022 Vize soruları ve cevap anahtarı (Soru sayfasına sığdırmaya çalıştım, kusura bakmayın. Büyüterek bakarsınız.)
- Geçmiş vize soruları ve cevap anahtarları
- Final/Bütünleme için çalışma soruları ve çözümleri
- Geçmiş final/bütünleme soruları ve cevap anahtarları
- 2019 final soruları ve cevap anahtarı
- 2025 final soruları ve cevap anahtarı
{kind=link}
Elektrik Makineleri - 1
Son yenilenme tarihi: 10.11.2025
Aşağıdaki ders notları tam değildir. Aralarında başka bazı konular vardır.
- İlk hafta sunumu
- Trafo yansıtılmış empedans ve admitans örneği (Bu sayfanın yeri, "Trafo Eşdeğer Devresi" konusundan hemen önce.)
- Trafo vektör şemaları (Bu sayfanın yeri, "Trafo Eşdeğer Devresi" konusundan hemen sonra, "Eşdeğer Devre Üzerinde Hesaplamalar" konusundan hemen önce.)
- Trafo eşdeğer devresi üzerinde hesaplamalar (yeni) (Bu dosyada düzeltmeler yapıldı, düzeltme yerleri öğrencilere e-postalandı. 10.11.2025)
- Elektromıknatıslar, Manyetik Kuvvet ve Enerji (Yeri, Trafolar'dan hemen sonra, DC Makineler'den hemen öncedir.)
- 2022 vize cevap anahtarı
- 2021 vize cevap anahtarı
- Güz 2022-23 final soruları ve cevap anahtarı
- Güz 2019-20 final soruları ve cevap anahtarı
- Güz 2019-20 vize soruları ve cevap anahtarı
- DC makineler soru çözümleri
- Yakın tarihli sınav soruları ve cevap anahtarları
- Eski sınav soruları ve cevap anahtarları (Ocak 2011'e kadar)
Elektrik Makineleri - 2
Son yenilenme tarihi: 15.7.2024
Ders notlarının tamamı paylaşılabilecek biçimde değildir. Dersi de takip etmek şartıyla şu konu dosyalarını indirmeniz faydalı olacaktır:
- 1) DC Makine ayrıntı şekilleri (Burada paylaşımda olmayan konular da var.)
- 2) AC makinelerin ortak giriş konuları
- 3) MMK çizim ve endüklenen gerilim hesabı örneği, ve Asenkron makineler
- 4) Asenkron makine soru çözümlerini adım adım izlemek için sunum dosyası
- 5) Eşdeğer devre parametrelerinin deneysel bulunuşu
- 6) Asenkron Makinenin Tork-Hız Karakteristiği
- 7) Asenkron Jeneratör
- Arada başka konular var.
- Per Unit Sistemi
- Çıkık Kutuplu Rotorlu Senkron Makineler
- 2024 final soruları ve cevap anahtarı
- 2011'den sonraki mevcut vize soruları ve cevap anahtarları (Daha eski sorulara çok benzeyenler mevcut olmayabilir.)
- 2011'den sonraki mevcut final ve bütünleme soruları ve cevap anahtarları (Daha eski sorulara çok benzeyenler mevcut olmayabilir.)
- 2010 ve öncesine ait mevcut bütün eski sınav soruları ve cevap anahtarları
Son yenilenme tarihi: 18.3.2021
Elektrik Makineleri Laboratuvarı
Deney yerine simülasyon dosyaları18.3.2021
Simülasyon dosyaları DC makine deneylerinin tamamı ve föylerde olmayanları için hazırlanmıştır. Bunlar MATLAB ya da Octave ile çalıştırılabilir. Octave ile çalışma oldukça yavaştır (MATLAB'ın 10-12 katı sürede) fakat yine de her birinin 2-3 dakikayı geçeceğini sanmıyorum.
Tüm DC makine deney simülasyon dosyaları
Simülasyonlarda hem histerezis etkisi hem de ksmen armatür reaksiyonu dikkate alınmıştır. Seri, şönt, kompund (ekelemeli ve çıkarmalı), yabancı uyartımlı, sabit mıknatıslı motor ve jeneratör modları dahildir.
BHisterezis.m dosyası, histerezis etkisini dikkate almak için gereken bir dosyadır. Tek başına çalıştırmanız gerekmemektedir.
DCjenerator.m dosyası gerekli ayarları yapılarak istenen tüm DC jeneratör deneyi için kullanılabilir.
DCmotor.m dosyası gerekli ayarları yapılarak istenen tüm DC motor deneyi için kullanılabilir.
Ancak ayarları yapamayabileceğinizi düşünerek her bir bağlantı veya çalıştırma modu için doğrudan çalıştırabileceğiniz ayarları yapıp ayrı ayrı dosyalar halinde de paylaştım. Dosya isimlerinden anlaşılıyor.
Bunların her birini çalıştırıp grafikleri inceleyiniz. Grafik penceresindeki ve eksenlerindeki açıklamaları inceleyiniz.
Deney simülasyon programlarının kullanımını VİDEOLAR ile de izleyebilirsiniz:
DC Jeneratör Simülasyonları Kısım 1
DC Jeneratör Simülasyonları Kısım 2
DC Motor Simülasyonları Kısım 1
DC Motor Simülasyonları Kısım 2
Notlar büyük ölçüde rapor notlarına göre olacaktır. Ayrıca vize, final/bütünleme sınavları yapılmayacaktır. Şöyle ki:
Vize notu, TR-1, TR-2, DC-1 ve DC-2 rapor notları (10 üzerinden) toplamının 2,5 ile çarpımı
Final notu, raporsuz olan AC-0 ve AC-3 deneylerinden katıldıkları için 5'er puan ile DC-3, DC-4, DC-5, AC-1 ve AC-2 rapor notları toplamının 10/6 ile çarpımı olacaktır.
Bütünleme notu, yukarıdaki gibi hesaplanan notlarının düşük olmasına neden olan raporlarının doğru düzgün yeniden yazılıp getirilmesi halinde geçmesi için gereken notun verilmesi ya da yetersiz kalan notunun verilmesi şeklinde olacaktır.
Notlar muhtemelen 60 üzeri sınıf ortalamasına göre olacaktır.
Aksi söylenmedikçe her hafta deney olduğunu varsayarak devam etmelisiniz.
Deneylere, bu sitedeki ilgili föyü okumuş olarak, zamanında ve kendi grubunuzda geliniz. Raporlu deneylere gelirken ön çalışmanızı yazıp getiriniz. Ön çalışma, deneyin adı, amacı, teorik bilgi ve deneyin yapılışının sadece devre şemalarının, raporun başlangıcı biçiminde kendi el yazınızla yazılıp deneye gelirken getirilmesidir. Deney sonunda ön çalışmalarınız sizde kalacak, deneyin yapılışı ve sonuların değerlendirilmesi tamamlanmış olarak bir sonraki deneye gelirken getirilecektir.
Raporlarınızı poşet dosyaya koymak yerine zımbalayıp poşetsiz vermenizi tercih ederiz.
ELEKTRİK MAKİNELERİ DENEY FÖYLERİ 18.5.2018
Linkler .pdf dosyaları için verilmiştir. doc dosyalarını isterseniz linklerdeki pdf uzantısını doc olarak değiştirmeyi deneyebilirsiniz. Ancak sunucumuz, doc dosyalarının indirilmesine izin vermediğini belirtmekle birlikte dosya küçükse izin vermektedir.
- Hepsi
- (Son deneyinki hariç, çünkü onunki powerpoint slayt sunumu. Ayrıca AC-0'ın föyünü ayrıca verilen dosyadan alınız; buradaki eskidir.)
- Deney TR-1
- a) Histerezis Döngüsü
- b) Tek Fazlı Trafo Sargılarının Kutuplaşmalarının ve Sarım Sayılarının Bulunması
- Deney TR-2
- a) Üç Fazlı Trafolarda Açık Devre ve Kısa Devre Testleri
- b) Üç Fazlı Trafoların Yüklü Çalışması
- Deney DC-1
- a) DC makinelerin Mıknatıslanma Eğrisi
- b) Yabancı Uyartımlı Dinamoların Dış Karakteristiği (Yardımcı matlab dosyasını indirebilirsiniz, hedefi farklı kaydet ile.)
- Deney DC-2
- a) Şönt Dinamoların Dış Karakteristiği ve Kritik Direnç
- b) Kompund Dinamoların Dış Karakteristikleri (Yardımcı matlab dosyasını indirebilirsiniz, hedefi farklı kaydet ile.)
- Deney DC-3
- Yabancı Uyartımlı Motorların Tork-Hız Karakteristiği (Sonuçları değerlendirip çizdiren matlab dosyası indirilebilir. Ayrıca grafiklerin pdf biçimi de indirilebilir.) 2014 yılına ait sonuçlar ve
Psür = B*wformülünü esas alan sürtünme katsayıları için ise şu matlab dosyasını indiriniz.
- Yabancı Uyartımlı Motorların Tork-Hız Karakteristiği (Sonuçları değerlendirip çizdiren matlab dosyası indirilebilir. Ayrıca grafiklerin pdf biçimi de indirilebilir.) 2014 yılına ait sonuçlar ve
- Deney DC-4
- a) Seri Motorların Tork-Hız Karakteristiği
- b) Şönt Motorların Tork-Hız Karakteristiği (Sonuçları değerlendirip çizdiren matlab dosyası indirilebilir.)
- Deney DC-5
- Kompund Motorların Tork-Hız Karakteristiği (Sonuçları değerlendirip çizdiren matlab dosyası indirilebilir.)
- Deney AC-0
- Asenkron Motorlara Yıldız Üçgen Yol Verme Devresi(Güncellendi. 26.4.2015)
- Asenkron Motorların Dinamik Frenlenmesi
- Deney AC-1
- a) Asenkron makinelerin Yüksüz Çalışma Ve Kilitli Rotor Testleri
- b) Asenkron makinelerin Tork – Hız Eğrisi
- Deney AC-2
- a) Senkron Alternatörlerin Açık Devre ve Kısa Devre Testleri
- b) Senkron Motorların "V" Eğrilerinin Çıkartılması
- Deney AC-3
- Senkron Alternatörlerin Bir Baraya Paralel Bağlanması (Föy yerine powerpoint slayt sunumu verilmiştir. Önce İNDİRİN, sonra çalıştırın.)
Araştırma ve Tasarım Yöntemleri 1-2
Son yenilenme tarihi: 22.4.2026
Derse dair genel açıklamalar
ATY2 Konuları
- Konu 1: Araştırma Yöntemleri7.3.2026
- Ödev 1 (Son teslim tarihi 18 Mart 2026 idi)10.3.2026
- Konu 2: Tasarım Yöntemleri17.3.2026
- Konu 3: David Akin'dan tasarım öğütleri23.3.2026
-
Konu-4: Üretim Kalitesi
Bu konu 2008 mezunlarımızdan Cerem Cem Aslan tarafından, "bilgi birikiminin kayıt altına alınması" konusunda tecrübelerinden faydalanmak için kendisinden bu dersimize özel talebim üzerine hazırlanmıştır. Kendisine çok teşekkür ediyoruz.5.4.2026 - Ödev 2, en geç 3 Mayıs 2026 Pazar günü e-posta ile teslim edilmelidir.22.4.2026
- Konu-5: Duyarlılık Analizi22.4.2026
- Konu-1 Gelişmeleri takip24.9.2025
- Ödev-1 Son teslim tarihi: 06.10.2025 Pazartesi24.9.2025
- Konu-2 Özgeçmiş hazırlamak2.10.2025
- Konu-3 Blok Şemalar8.10.2025
- Konu-4 Hata Bulmak20.10.2025
- Konu-5 Birim Uyumu3.11.2025
- Ödev-2 Son teslim tarihi: 23.11.20253.11.2025
- Konu-6 İşlemlerde Belirsizlik Birikimi3.12.2025
- Ödev-3 kişiye özel verilerle tek tek e-postalanmıştır. Son teslim tarihi: 18.12.2025 Perşembe. 3.12.2025
ATY1 Konuları
Son yenilenme tarihi: 16.3.2026
Bitirme Projeleri
2024-2025 eğitim-öğretim yılında Bitirme Projesi 1 dersi için vermeyi düşündüğüm proje konularının bir kısmı aşağıda verilmiştir. Projelerin HEPSİ TEK DÖNEMLİKTİR. Hem uygulamalı çalışma, hem de rapor hazırlanması şeklinde istiyorum. Rapor, uygulama tamamlandıktan sonra hazırlanmalıdır. Öğrencinin başarıyla çalıştıramadığı bir uygulamayla geçebilmesi için, uygulamanın makul bir tasarımla finaller başlamadan 1 hafta öncesine kadar tamamlanmış olarak gösterilmesini ve finaller bitinceye kadar, çalışmama nedeniyle ilgili tahminler, giderilmesi için yapılanlar ve sonuçlarıyla ilgili çok sayıda denemeyi anlatan gayri resmi nitelikte (ödev yazım kuralları aranmaksızın, el yazısı da olabilir) bir rapor verilmesini isterim. Bu çalışmayı geçmeye yeterli görüp görmeyeceğime bunlara göre karar verebilirim.
Buradaki konuların dışında konu öneriniz varsa görüşüp uygun bulunursa alınabilir.
Kontenjanlar (boşsa "○" , dolmuşsa "●" biçimlerinde gösterilmiştir. Ekipteki öğrenci sayısı da buradan anlaşılabilir.
Dört motorlu uzaktan kumandalı bir uçaduran yapılması istenmektedir. Kendi ağırlığına ek olarak 200 gram daha taşıyabilmesi, dengeli biçimde uçabilmesi, gidip gelebilmesi, güvenli iniş yapabilmesi yeterlidir. Temel seviyedeki projede kamera ve görüntü işleme eklenmesi beklenmemektedir. Ancak bunları da eklemek isterseniz, görev paylaşımı baştan belli olacak şekilde ekip eleman sayısı artırılabilir.
Yerden hızlanarak kalkan ve inp yavaşlayarak duran bir model uçağın iniş takımlarının tasarımı ve gerçekleştirilmesi istenmektedir. Kalkıştan sonra iniş takımları toplanıp kapağı kapatılacak ve görevin sorunsuz tamamlandığı ya da sorun varsa hangi tarafta ne olduğu işlemciye bildirilecektir. Kalkış öncesi de tersi sırayla, yani kapağı açılıp iniş takımları açılacak ve görevin sorunsuz tamamlandığı ya da sorun varsa hangi tarafta ne olduğu işlemciye bildirilecektir. Gerçek bir model uçak olması şart değildir. Uçağın alt kısmına benzeyen bir yüzeye de yerleştirilebilir.
İki tekerli ve düşey düzlemde yüksekliği olan bir araç yapılması istenmektedir. Araç uzaktan kumanda ile yönlendirilebilmeli, hem ilerleme hem de durma komutlarını yerine getirirken dengesini koruyabilmelidir. Denge çabasında salınım kaçınılmazdır. Ama salınım genliği ne kadar küçük sınırlarda tutulabilirse o kadar başarılı sayılacaktır.
Uzaktan kumandalı bir yüzeduran yapılması istenmektedir. Motor veya itici (thruster) sayısı size kalmış. Kendi ağırlığına ek olarak 500 gram daha taşıyabilmesi, dengeli biçimde suya dalıp yüzebilmesi, gidip gelebilmesi ve su yüzeyine çıkabilmesi yeterlidir.
Gücü, gerilimi ve hızı imkanlarınıza göre seçilebilecek bir BLDC motor yapmanız istenmektedir. Motorun sürücüsünü de yapacaksanız, görev dağılımı baştan belli olacak şekilde ekip öğrenci sayısı artırılabilir.
Gerilim dalga şekli sinüzoidal olmayan bir periyodik sinyal ise çoğu ölçü aletinin gösterdiği ölçüm değeri yanlış olur. Gerçek etkin değer (true rms) ölçmenin yollarından birisi, bir PIC'in ADC'siyle gerilimin anlık değerlerini örnekleyerek uzun bir süre (1-2 s gibi) içinde bunların kare ortalamasını hesaplamaktır. İsteyen başka yollarla da tasarım yapabilir.
Yazılım projesidir. Aynı anda konuşan bir erkek ve bir kadının, ya da bir konuşma ve bir müzik seslerinin ayrıştırılması istenmektedir.
Bir programlama projesidir. Eğik açıdan görülen saha resmi üzerindeki dik kenar çizgileri yardımıyla resmin eğimi hesaplanıp herhangi bir noktayı (serbest vuruş noktası gibi) merkez kabul eden belirli bir yarıçapta (9m15cm baraj sınırı gibi) çember çizilmesi istenmektedir. Ayrıca belirli bir noktadan kenarlardan birine paralel çizgi (ofsayt sınırı gibi) çizilmesi de istenmektedir. Bu konu, üstten görünüşü verilen düzlemsel bir çizimin eğik bakış açısıyla çizimini (ve tam tersini) içermektedir.
Gözlük camı varken ve yokken morötesi (UV=ultraviyole) ölçümü yapılarak ne derece filtreleme yapıldığına göre gözlük kalitesi bir ekrana yazdırılacaktır. UV sensörün en hassas dalga boyu 300nm civarı olmalı ve hassasiyet sınırları yaklaşık 250-400nm aralığına yayılmış olmalıdır. Böyle bir UV sensör bulmanız zor olabilir. Projeyi kabullenmeden önce sensör bulup bulamayacağınızı ve maliyetinin uygunluğunu araştırınız.
Stroboflaş, ayarlanan frekansta yanıp sönen bir lamba demektir. Yüksek yanıp sönme hızları için genellikle neon lamba kullanılır. Günümüzde güç LED'leri de yeterli performansı verebilmektedir. Stroboflaş ile dönen bir tekere bakılırken, yanıp sönme frekansı dönüş frekansına eşitlenirse teker duruyormuş gibi görünür. İlkel şekli rot-balanscılar tarafından da kullanılan bu cihaz motor dönüş hızının görsel olarak ölçülmesi amacıyla kullanılacaktır. Yanıp sönme frekansı dakikadaki sayı cinsinden 4 rakamlı bir LCD ekranda gösterilecektir. Bu projenin olmazsa olmazı, BİNDE BİRden daha hassas ölçmesidir! Aksi halde hiç bir işe yaramayacaktır. Çünkü asenkron motor zaten çok dar bir hız aralığında çalışır ve küçük bir kayma farkı çok önemlidir. Ayrıca tecrübeli bir kulakla bile motor hızı yüzde birkaç hassasiyetle tahmin edilebilmektedir.
Kasaya gelen her bir bozuk para türünü doğru yerde hesaba katarak, kasada bozuk paraların her birinden kaçar adet olduğu bilgisi her işlemde güncellenmek üzere, belirli bir tutarda ödeme için gelen paranın üzerinin hangi bozuk paradan kaçar adet verileceğini hesaplayan ve bunlar için de dışarıya birer sinyal gönderen bir yazılımı istenmektedir. Mevcut bozuk para miktarı sıkıntılı olduğunda para üstü vermeyi kolaylaştırıcı önerilerde bulunabilmelidir ("1,50 TL'niz var mıydı?" gibi).
Yüksek bir sesin hangi yönden geldiğini gösterecek. Düzlemde 8 yönü gösteren LEDlerden biri yanarak yön gösterilecek. Değişik yöntemler deneyebilirsiniz. 3 mikrofona sesin ulaşma zamanları arasındaki farkı kullanmak mümkündür.
Gerçek anlamda bir araştırma ödevidir (derleme değil!). Yük altındaki voltaj düşümünü de dikkate alarak, yani bataryanın hem akımını hem gerilimini hassas ölçerek şarj durumunu (SOC) göstermeniz isteniyor. Çeşitli akım ve şarj durumlarında gerilim ölçümleri yapılarak matris tablolar oluşturulacak. Gerçek çalışma şartlarında ölçülen akım ve gerilime göre de şarj durumu bu tablolara göre belirlenecek.
Son yenilenme tarihi: 15.10.2015
Elk. Motor. Denetimi
4. hafta dersimizde yapılan dc motor simülasyonu programının düzenlenmiş halini indirebilirsiniz. MATLAB programıdır.
**********************
Aşağıdakiler ise 2012 tarihli dosyalar ve ödevlerdir:
Elektrik Motorlarının Denetimi dersinde MATLAB üzerinde yapılanlar ile ödevlerinizde yardımcı olacak MATLAB dosyalarını buradan indirebilirsiniz.
Başlıca dosyalar hakkında aıklamalar şöyledir:
- dcmotor.m: DC servo motor
- asenkron_albt.m: Durgun (alfa,beta) eksenlere göre asenkron motor simülasyonu (voltajların bir şekilde üretildiği varsayılıyor)
- asenkron_ws.m: Senkron hızda dönen (dq) eksenlere göre asenkron motor simülasyonu (voltajların bir şekilde üretildiği varsayılıyor)
- asenkron_pwm.m: Durgun (alfa,beta) eksenlere göre asenkron motor simülasyonu ama uzay vektör modülasyonlu pwm ile.
- pmsm.m: Senkron hızda dönen (dq) eksenlere göre sabit mıknatıslı senkron motor simülasyonu (voltajların bir şekilde üretildiği varsayılıyor)
- srsm.m: Senkron hızda dönen (dq) eksenlere göre sargılı rotorlu senkron motor simülasyonu (voltajların bir şekilde üretildiği varsayılıyor)
- DTC (klasör): Doğrudan tork kontrolü ile asenkron motorun durgun (alfa,beta) eksenlere göre simülasyon dosyaları olup şu an çalışmakla beraber daha da güncellenecektir.
DTC için derste kullandığım internet sayfasının bağlantısı
Ödevler şöyledir:
Ödev 3 ve 4
Sabit mıknatıslı senkron motor ve sargılı rotorlu senkron motor modellerinden birisini uzay vektörlü FOC, diğerini de DTC yöntemiyle kontrol etmeniz istenmektedir. Bunun için asenkron motor için yazılmış asenkron_pwm.m dosyası ve DTC klasöründeki dosyaları uygun şekilde düzenleyebilirsiniz. Ancak, senkron motorların en uygun simülasyonları senkron hızla dönen eksenlere (dq) göre olmasına rağmen kontrol yazılımınızın doğrudan dq akım bileşenlerinden ölçüm alması yasaktır; çünkü pratikte bu mümkün değildir. dq akım bileşenleri durgun alfa,beta eksenlerine dönüştürülerek ölçüm olarak alınmalıdır. (Bunun tekrar dq eksenlerine dönüştürülerek kullanılması yazılım için gereksiz bir dönüşüm-ters dönüşüm çifti gibi görülse de ileride ölçümlerde gürültü olduğunu düşündüğünüzde fark önemli olacak. Ama siz yine de şimdilik gürültüsüz çalışacaksınız.) Simülasyonlarda motorlar yüksüz kaldırılacak, hız dengeye gelince yüklenecek, tekrar hız dengeye gelince yük sıfırlanarak tekrar dengeye gelene kadar yeterli bir sürede simülasyon tamamlanacaktır. Akımlar ve hız çizilecektir. Programlarınız ile seçenekleriniz (DTC ile sargılı rotorlu ve FOC ile sabit mıknatıslı ya da DTC ile sabit mıknatıslı ve FOC ile sargılı rotorlu) birbirinizden alındığını düşündürtecek kadar benzememelidir.
Ödev 2 şöyledir:
Asenkron motor ve senkron motor için ayrı ayrı birer simulink model dosyası üzerinde motora uygun genlikte 50Hz'lik AC gerilim uygulayınız. Motor başta yüksüz olsun. Çalışma dengeye geldikten bir süre sonra anma değerine yakın büyüklükte bir yük torku uygulansın. Yeniden dengeye ulaşıldıktan sonra ise yük torku tamamen kaldırılsın. Yeniden dengeye ulaşıldıktan sonra AC kaynak geriliminin genliği aniden %40 artırılsın. Yeniden dengeye ulaşıldıktan sonra ise bu gerilim tekrar eski değerine getirilsin. Çalışmada görüntülenmesi istenen grafikler şunlardır: Senkron motorun stator, asenkron motorun rotor akısı vektörünün büyüklüğü ile iki motorda da stator fazlarından birisinin akımı (50Hz'lik AC akım) ve rotor hızı (devir/dakika = rpm cinsinden).
İki ayrı model dosyası teslim etmeniz beklenmektedir. Herbirinde 3'er grafik çizilmelidir.
Ödev 1 şöyledir:
Derste Euler metoduyla yapılan DC motor model simülasyonunu Runga-Kutta metoduna göre düzenleyiniz. Giriş voltajını rampa şeklinde sıfırdan itibaren artırarak motoru kaldırınız. Sonra voltajı anma değerinde sabit tutunuz. Kalkış sırasında ve motor dengeye gelene kadar bir süre yük torku sıfır olsun. Sonra aniden tam yük torkunu uygulayınız. Yine dengeye geldikten bir süre sonra aniden yük torkunu kaldırınız. Dengeye geldikten sonra giriş voltajını rampa inişi şeklinde zıt yönde anma değerine getiriniz ve bu değerde sabit tutunuz. Dengeye gelince öncekiyle aynı işaretli yük torkunu aniden uygulayınız. Bu durumda DC makine jeneratör moduna geçecek ve biraz hızlanacaktır. Dengede bir süre çalıştıktan sonra yük torkunu aniden kaldırınız(sıfırlayınız). Yine dengede bir süre çalıştıktan sonra giriş voltajını aniden sıfırlayınız. Dengeye gelinceye kadar (hız ve akım sıfırlanana kadar) bir süre daha çalıştırıp simülasyonu sonuçlandırınız. Tüm bunlar aynı simülasyon çalışması içinde yer alacaktır. Hız ve yük torkunu uygun bir ölçekle (değişimler farkedilebilecek şekilde) aynı grafik penceresinde, voltaj ve akım grafiklerini de başka bir grafik penceresinde yine uygun ölçeklerle çizdiriniz. Grafikler üzerine Matlab komutlarıyla açıklamalar yazdırınız.
Son yenilenme tarihi: 27.12.2018
Kontrol Sis. Tasarımı
Kontrol Sistemleri Tasarımı ders içeriği ve tanıtım formu (English available)
3. ve 4. ödev ile bazı dosyalar. Bu iki ödev 19 Ocak 2019 Cumartesi gününe kadar e-postalanmalıdır.
ÖDEV#2: 25 Kasım 2018 Pazar gününe kadar e-postalanmalıydı. Ödeve yardımcı olacak ders dosyamız.
ÖDEV#1: 04 Kasım 2018 Pazar gününe kadar e-postalanmalıydı.
Son yenilenme tarihi: 15.02.2012
Kumanda ve Kontrol-1
Durum uzayı çizimleri için faydalanabileceğiniz bir dosya. İndiremezseniz görüntülediğiniz dosyadaki metni kopyalayıp bir .m dosyasına kaydederek kullanınız.
Ders 9 ile ilgili dosyalar (Yeni sekmede açıp toplu olarak ya da istediğiniz bileşenini indiriniz. En iyi Chrome ile çalışır.)
Ders 7 ile ilgili dosyalar (Yeni sekmede açıp indiriniz.)
Ders 6 ile ilgili dosya (Yeni sekmede açıp indiriniz.)
Ders 5 ile ilgili dosyalar (Yeni sekmede açıp indiriniz.)
Lineer Sistem Teorisi
Son yenilenme tarihi: 30.3.2026
Ödevler:
- Ödev 1 (En geç 8.3.2026 tarihinde bana e-postalanmalıydı.)
- Ödev 2 (En geç 8.4.2026 tarihinde e-postalanmalıdır.)
Ders notları:
- Lineer Cebir [1]
- Sıfır uzayı bulma için ilave bir örnek
- Görüntü uzayı ve sıfır uzayı için birer taban bulmak için pivot yöntemi (Yeni)
- Dinamik Sistem Teorisi [1]
- Normlu vektör uzayları [1]
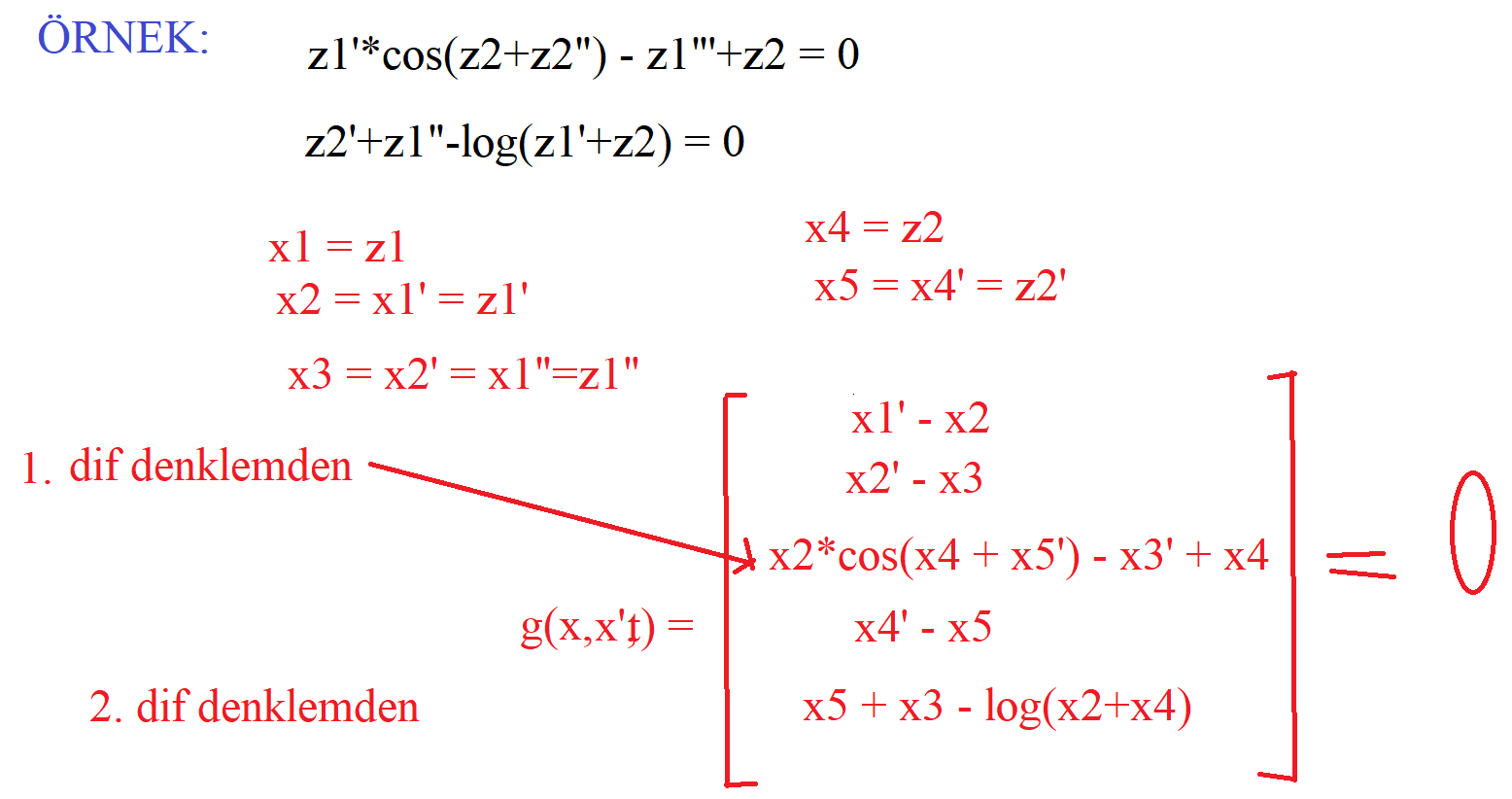
- Diferansiyel Denklemler [1]
- Diferansiyel denklemi normal biçime getirme için bir örnek
- Taylor serisine açma formülleri
- Doğrusal Sistemler [1] [2]
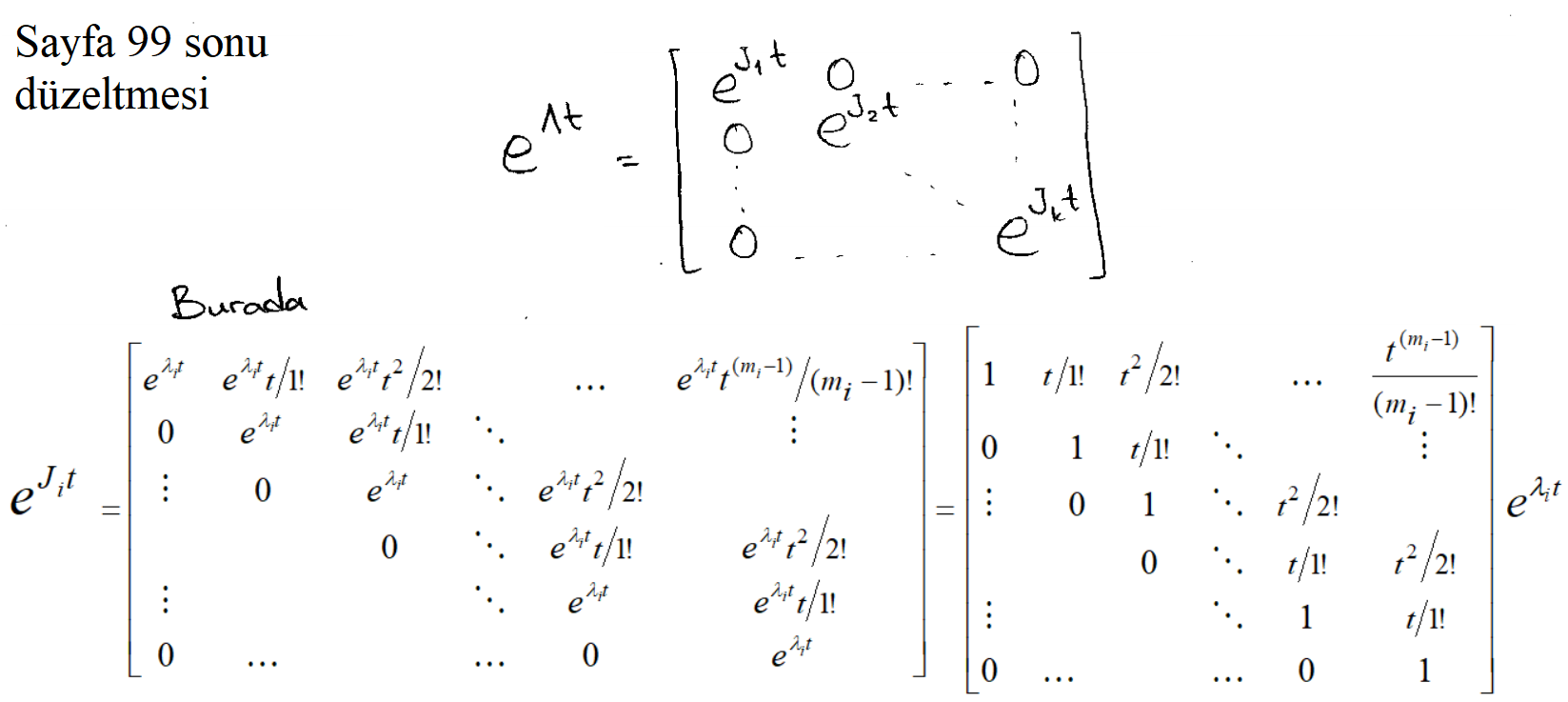
- Sayfa 99 sonu düzeltmesi
- Karmaşık özdeğerler için e^At matrisi
- A^k matrisinin özvektörlerle bulunması
- A^k matrisinin Cayley-Hamilton yöntemiyle bulunması
- A^k matrisinin özvektör/genelleştirilmiş özvektörlerle bulunmasına 3 boyutlu bir örnek
{kind=link}
{kind=link}
Bu ders notlarının hazırlanmasında faydalanılan kaynaklar:
[1] Prof. Dr. Mustafa Kuzuoğlu'nun (ODTÜ Elk.-Elk. Müh. Böl.) Linear Systems Theory-1 dersinde anlattığı notlar.
[2] (Merhum) Prof. Dr. Veysel Silindir'in (Gazi Ünv. Elk.-Elk. Müh. Böl.) Kontrol Sistemleri-2 dersinde anlattığı notlar.
Son yenilenme tarihi: 07.01.2017
Yarı İletkenler
Aşağıda NPN ve PNP transistörlerin çalışma ilkeleri yeniden anlatılmıştır. Koyu yazılan kısım transistörün nasıl akım yükseltmesi yaptığının püf noktasıdır.
Aşağıda herhangi bir hata bulursanız lütfen A.Sevinc@kku.edu.tr adresine bildiriniz.
NPN TRANSİSTÖRÜN ÇALIŞMA İLKESİ
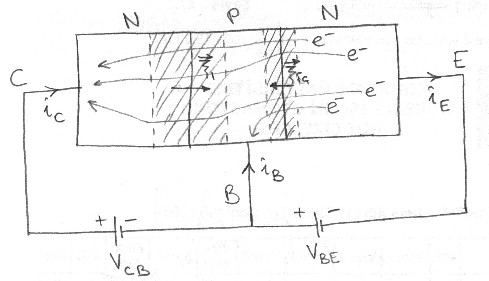
Soldaki NP eklemi ters kutuplanırsa taşıyıcılardan boşaltılmış bölge genişler. Eklem yüzeyinin P tarafında (-) yüklü alıcı iyonlar, N tarafında (+) yüklü verici iyonlar bulunduğundan, şekildeki yönde bir ξı elektrik alanı vardır. Bu alan çoğunluk taşıyıcılarının geçişine izin vermez. Azınlık taşıyıcısı olmadığı sürece bu eklemden akım geçmez.
Sağdaki PN eklemi doğru kutuplanırsa bu eklemin boşaltılmış bölgesi daralır. VBE voltajı, ξiç elektrik alanına zıt yönde, onu yenecek bir alan oluşturacak büyüklükteyse (iletim voltajına ulaşmışsa) çoğunluk taşıyıcıları bu eklemi geçerler ve B’den E’ye bir akım geçer. N bölgesinin çoğunluk taşıyıcıları olan serbest elektronlar P bölgesine ulaştıklarında, bu bölge çok ince ve yüksek özdirençli olduğu için, çoğu B ucuna ulaşamadan kendilerini soldaki eklemin taşıyıcılardan boşaltılmış bölgesinde bulurlar. P bölgesi için azınlık taşıyıcısı sayılan bu elektronlar, ξı elektrik alanının yardımıyla kolayca soldaki N bölgesine geçerler. Buradan da VCB geriliminin (+) kutbu tarafından çekilirler ve şekildeki yönde bir iC akımı oluşur.
P bölgesindeki serbest elektronların ancak az bir kısmı B ucuna ulaştığı için iC >> iB olur. Yani kollektör akımı (iC), beyz akımının (iB) yükseltilmişi olarak elde edilir.
PNP TRANSİSTÖRÜN ÇALIŞMA İLKESİ
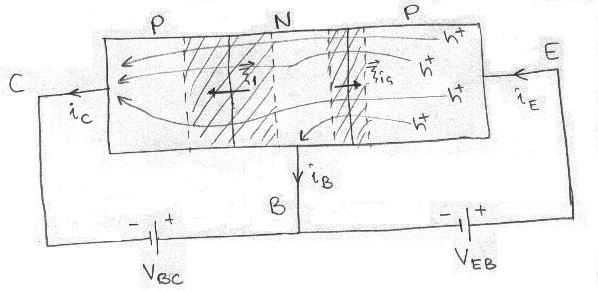
Soldaki PN eklemi ters kutuplanırsa taşıyıcılardan boşaltılmış bölge genişler. Eklem yüzeyinin N tarafında (+) yüklü verici iyonlar, P tarafında (-) yüklü alıcı iyonlar bulunduğundan, şekildeki yönde bir ξı elektrik alanı vardır. Bu alan çoğunluk taşıyıcılarının geçişine izin vermez. Azınlık taşıyıcısı olmadığı sürece bu eklemden akım geçmez.
Sağdaki NP eklemi doğru kutuplanırsa bu eklemin boşaltılmış bölgesi daralır. VEB voltajı, ξiç elektrik alanına zıt yönde, onu yenecek bir alan oluşturacak büyüklükteyse (iletim voltajına ulaşmışsa) çoğunluk taşıyıcıları bu eklemi geçerler ve E’den B’ye bir akım geçer. P bölgesinin çoğunluk taşıyıcıları olan holler N bölgesine ulaştıklarında, bu bölge çok ince ve yüksek özdirençli olduğu için, çoğu B ucuna ulaşamadan kendilerini soldaki eklemin taşıyıcılardan boşaltılmış bölgesinde bulurlar. N bölgesi için azınlık taşıyıcısı sayılan bu holler, ξı elektrik alanının yardımıyla kolayca soldaki P bölgesine geçerler. Buradan da VBC geriliminin (-) kutbu tarafından çekilirler ve şekildeki yönde bir iC akımı oluşur.
N bölgesindeki hollerin ancak az bir kısmı B ucuna ulaştığı için iC >> iB olur. Yani kollektör akımı (iC), beyz akımının (iB) yükseltilmişi olarak elde edilir.
BJT TERS KULLANILABİLİR Mİ?
BJT'nin emiter ve kollektörünün birbiri yerine kullanılması halinde akım kazancı β çok küçük olur. Küçük akımlarda 1-2 civarında olur. Bu da tercih edilmeyen bir kullanım olur.
BİR BJT, İKİ YÖNLÜ ANAHTAR OLARAK KULLANILABİLİR Mİ?
Soruyu biraz açalım: BJT'nin ters kullanımının sakıncası sadece kazancın düşmesi ise, onu anahtar olarak kullanırken kazancını umursamasak, tek bir BJT'yi çift yönlü anahtar olarak kullanmak ekonomik bir çözüm olur mu? Zira IGBT, MOSFET gibi anahtar elemanlar doyumdayken üzerinde 3,5-4V gerilim düşümü olurken BJT'de bu 0,2-0,3V'a kadar düşebilmektedir. Böylece çok daha az kayıpla çalışmış olmaz mıyız?
Cevap: Tek bir BJT bu amaçla kullanılabilir görünse de güç elektroniğinde böyle bir kullanım hiç tercih edilmez. Nedenleri:
- 1) Ters kullanımda β çok küçüktür ve doyma bölgesi civarında çok daha küçüktür, 1'den bile oldukça küçüktür. Yani ters kullanımda elemanı doyuma getirmek için kollektörden geçireceğimiz akımdan daha fazlasını beyzden geçirmek zorunda kalırız. Yani kontrol kaybı yine büyük olur.
- 2) Ayrıca akım yükselince beyz ile emiter (aslında kollektör olup ters kullandığımız için emiter dediğimiz uç) arasındaki gerilim 0,7V'ta kalmaz, çok daha artar. Bu da kontrol kaybını daha da artırır.
- 3) Tüm bu kayıplara razı olsak bile elemanı muhtemelen elle değil, elektronik bir devreyle otomatik olarak anahtarlamak isteriz. Bu durumda beyz ile emiter (aslında kollektör olup ters kullandığımız için emiter dediğimiz uç) arasına yüksek akım taşıyabilen başka bir yarı iletken anahtar kullanmamız gerekir ve optocoupler'ler pek yüksek akım taşıyamaz. Yani BJT'yi ters anahtar olarak kullanmak için yaklaşık aynı akımlı başka bir yarı iletken anahtar kullanmamız gerekmesinden dolayı böyle bir kullanım saçma olur.
Son yenilenme tarihi: 27.12.2010
Sinyaller ve Sistemler-1
Aşağıda bazı konvolüsyon soruları ve çözümleri verilmiştir.
Çözümlü sorular (4 sayfa 168KB):
Sinyaller ve Sistemler dersleri birleşmeden önceki Sinyaller ve Sitemler - 1 dersine ait mevcut bütün geçmiş yılların sınav soruları ve cevap anahtarları (48 sayfa 2,73MB) ya da divshare adresinden alınız.. İsterseniz aynı dosyayı aşağıdaki gibi daha küçük parçalar halinde de alabilirsiniz.
- Birinci Kısım (9 sayfa 684KB)
- İkinci Kısım (12 sayfa 800KB)
- Üçüncü Kısım (15 sayfa 865KB)
- Dördüncü Kısım (12 sayfa 495KB)
Son yenilenme tarihi: 27.12.2010
Sinyaller ve Sistemler-2
Sinyaller ve Sistemler dersleri birleşmeden önceki Sinyaller ve Sitemler - 2 dersine ait mevcut bütün geçmiş yılların sınav soruları ve ve cevap anahtarları (15 sayfa 1,1MB) ya da divshare adresinden alınız.